
Actas del Congreso Nacional de
Tecnología Aplicada a Ciencias
de la Salud
Actas del Congreso Nacional de Tecnología Aplicada a Ciencias de la Salud Vol. 2, 2019
El Alzheimer es un trastorno cerebral que puede afectar gravemente la capacidad de una persona para llevar a cabo sus actividades diarias. A fin de generar un tratamiento más preciso se propone un sistema que utiliza un robot móvil que sigue a corta distancia al paciente y un equipo de cómputo que recibe la información de la localización del robot y de sensores ubicados en puntos de interés de la vivienda. La información es procesada y se buscan anomalías en las tareas, generando notificaciones cuando las actividades no corresponden a conductas naturales de una persona en sus actividades diarias. Mediante una aplicación móvil esta información también la pueden observar médicos especialistas y sus familiares.
Palabras clave: Robot, Alzheimer, Localización, Sensores, Aplicación Móvil
Alzheimer's is a brain disorder that can severely affect a person's ability to carry out their daily activities. In order to generate a more precise treatment, we propose a system that uses a mobile robot that follows a short distance to the patient and a computer that receives information on the location of the robot and sensors located at points of interest in the home. The information is processed and anomalies are looked for in the tasks, generating notifications when the activities do not correspond to natural behaviors of a person in their daily activities. Through a mobile application this information can also be observed by medical specialists.
Keywords: Robot, Alzheimer's, Location, Sensors, Mobile Application
En todo el mundo, existen millones de personas que padecen Alzheimer, una enfermedad que se caracteriza por un deterioro mental progresivo. Los principales problemas de estos pacientes en los estadios iniciales de la enfermedad pueden ir desde no poder reconocer a su familia, llamar reiteradas veces por teléfono a la misma persona, así como olvidar las fechas de los cumpleaños o de los acontecimientos más importantes en la vida de sus familiares y amigos [3]. Se han realizado trabajos con robots que asisten a pacientes con Alzheimer, por mencionar algunos; en el centro geriátrico Kustaankartano en Helsinki adquirió una pareja de robots, con la finalidad de que los enfermos de Alzheimer sigan el movimiento de este par de cabezas robóticas a ritmo de la música, concretamente, con el de la canción Bohemian Rhapsody de Queen. Con esta terapia, además de entretenerse, aprenden rutinas y ejercicios para realizar con el cuello y la cabeza, además de que sean capaces de seguir una canción. Ver Figura 1. [1]

Figura 1. Par de robots para entrenar a enfermos de Alzheimer
Otra aportación es en los Centros Comunitarios de Estados Unidos que acompañan a las personas con Alzheimer, han introducido una variante curiosa en este tipo de terapia: utilizar mascotas robot. Aunque no son animales de verdad, se mueven y hacen compañía a los ancianos. Según los investigadores, las mascotas robóticas ayudan a ejercitar y a mantener la concentración. Además, contribuyen a reducir el estrés, la ansiedad y la depresión. Ver Figura 2 [2]

Figura 2. Mascota Robot para acompañar a las personas con Alzheimer
En esta sección se definen claramente cada una de las diferentes etapas involucradas en el desarrollo del presente proyecto: la instalación de sensores de proximidad en aparatos domésticos, diseño del mapa de sensores, descripción general del Robot acompañante, la base de Datos, y finalmente aplicación móvil de monitoreo. (ver Figura 3)

Figura 3. Metodología de Desarrollo
2.1 Instalación de sensores de proximidad
Los sensores de proximidad son módulos que se utilizan para detectar la presencia de objetos cercanos sin necesidad de contacto físico. Los sensores de proximidad utilizan una serie de métodos de detección físicos que incluyen el acoplamiento capacitivo, captador inductivo, infrarrojo, fotodetección de luz ambiental, ultrasonido y efecto Hall. Por lo que se instalan sensores en aparatos domésticos.
2.2 Diseño del mapa de sensores y descripción general del robot acompañante
Se diseña el mapa de sensores en electrodomésticos y mobiliario, claves de las actividades diarias en la casa del paciente, además se diseña un robot de baja velocidad para el acompañamiento a una distancia establecida a personas con Alzheimer, el robot cuenta con navegación GPS para conocer la ubicación de los sensores de proximidad y así registrar la actividad que realizan los pacientes en casa. (ver Figura 4)

Figura 4. Ejemplo del plano de la casa de un paciente
2.3 Sistema de adquisición de datos y base de datos
La obtención de datos se manda mediante geolocalización establecida entre el robot y un servicio de tipo REST (por sus siglas en inglés Representation State Transfer) que establece la comunicación entre el cliente y el servidor de un sistema web. La información obtenida se guarda en una base de datos en Oracle SQL que se encuentra en un servidor.
Una de las tablas de la base de datos contiene los campos de registro de actividad de proximidad a los sensores con campos que corresponden a la ubicación, fecha, hora inicio, hora final de la actividad y duración de actividad para poder agregar información en caso de que se identifique como una anomalía. Es importante mencionar los datos hasta esta parte de la investigación se utilizaron crudos, es decir, el valor directo que se obtuvo los sensores, y solo se reporta el resultado.
2.4 Algoritmo
Dada la ubicación del paciente el asistente robótico de baja velocidad, lo acompañara a una distancia establecida, si el paciente realiza alguna actividad el robot se moverá obteniendo su longitud y latitud durante todo su trayecto, si el paciente se detiene el robot se detiene y además de obtener la ubicación verifica si hay algún sensor en él que pueda registrar una visita obteniendo y registrando la hora en la base de datos, si el paciente continua sin avanzar el robot espera hasta que finalice la actividad, de lo contrario tomara la hora final y la comparará con la inicial para determinar el tiempo que tardo en realizar la actividad asociada a dicho sensor, de la cual se podrá determinar si la duración de la actividad esta definida como aceptable o si es una anomalía de comportamiento, de esta manera se almacenaran los datos de hora final de la actividad, duración y si la actividad es considerada como anomalía, por ejemplo si visito 15 veces en un día el refrigerador con tiempos cortos de 1 o 2 segundos, donde por el tiempo no pudo haber concretado una actividad específica en esa área, puede identificarse como un comportamiento no apropiado y que marcan cambios en la conducta del paciente. (Ver Figura 5)
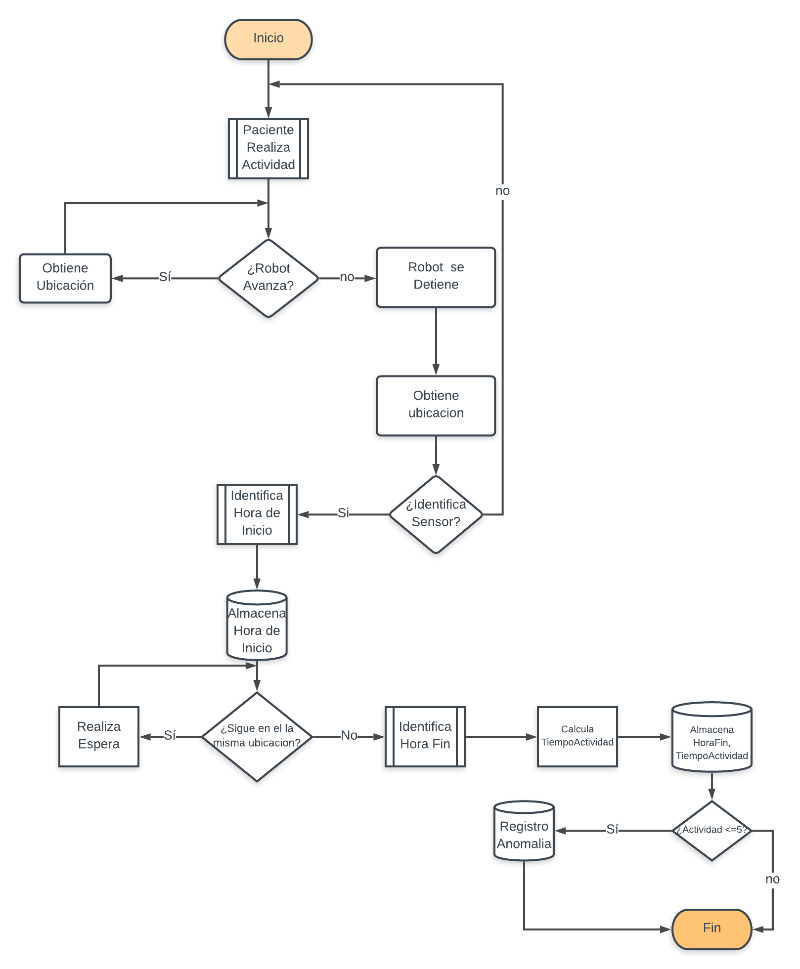
Figura 5. Algoritmo de Anomalías
2.5 Aplicación móvil
Los datos almacenados en la base de datos serán monitoreados por familiares y médicos tratantes, a través de una aplicación móvil, disponible para sistemas Android y IOS. En la cual además de ver los reportes de los registros de la actividad diaria del paciente, además de conocer la interacción con diferentes aparatos electrodomésticos donde se han colocado estratégicamente los sensores y la generación de gráficos estadísticos que nos permitan interpretar el comportamiento del paciente en cuanto a anomalías, en función de esto el médico tratante podrá determinar un diagnóstico.
La recolección de datos en tiempo real es de vital importancia para conocer la cantidad de visitas, y en función de estas medidas saber si existen visitas recurrentes y tiempos no establecidos los cuales pueden ser registrados como una anomalía, en la tabla se describen registros de visitas a un determinado sensor en los cuales se identifican, visitas recurrentes al sensor ubicado en el microondas, donde la duración de 4 actividades realizadas el 27 de mayo fueron identificadas como anomalías porque por el tiempo no se pudo haber concretado una actividad del uso del mismo en ese intervalo de tiempo y se realiza la interpretación en la gráfica de la figura 6. (ver Tabla 1, Figura 6)
Tabla 1. Ejemplo de Registro de Anomalías
| Fecha | Latitud | Longitud | Hora Inicio | Hora Fin | Tiempo Actividad | Anomalía |
|---|---|---|---|---|---|---|
| 27-may-19 | 19.0051 | -98.2046 | 08:00:00 | 08:10:00 a. m. | 2 | No |
| 27-may-19 | 19.0051 | -98.2046 | 09:00:00 | 09:00:05 a. m. | 0.05 | Si |
| 27-may-19 | 19.0051 | -98.2046 | 12:00:00 | 12:05:00 p. m. | 1 | No |
| 27-may-19 | 19.0051 | -98.2046 | 14:00:00 | 02:00:06 p. m. | 0.06 | Si |
| 27-may-19 | 19.0051 | -98.2046 | 14:05:00 | 02:05:05 p. m. | 0.06 | Si |
| 27-may-19 | 19.0051 | -98.2046 | 14:10:00 | 02:10:05 p.m. | 0.06 | Si |
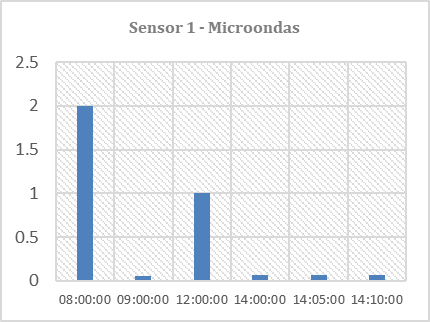
Figura 6. Gráfico de Anomalías tiempo
esta etapa del proyecto el robot asistente acompaña a pacientes de Alzheimer, y a través de él podemos conocer su ubicación y determinar la duración de las actividades mediante sensores ubicados estratégicamente en aparatos electrodomésticos y así determinar si se trata de alguna anomalía.
El trabajo a futuro está basado en subsistemas basados en el uso de base de datos, reconocimiento de imagen, implementación de árboles de decisiones y el seguimiento de las actividades de las personas a través de sensores y micrófonos instalados en el robot, sea capaz de memorizar rutinas, personas conocidas y cercanas del paciente, asociar palabras o hechos dentro del espacio donde se encuentre principalmente el paciente, grabando de las conversaciones que obtiene el robot con la ayuda de inteligencia artificial y lógica difusa.